This page tries to provide a simple to understand rundown of the study “It pays to have a spring in your step”. Information on this page was qoted or abridged from the study unless otherwise specified.
Authors: Gregory S. Sawicki, Cara L. Lewis and Daniel P. Ferris
Figures, unless otherwise specified, have been taken from the study.
Final edit published at:
2009 July
One sentence summary
“Humans produce mechanical work at the ankle joint during walking with an efficiency two to six times greater than isolated muscle efficiency.”
Takeaway
The efficiency of the ankle joint during walking is increased beyond that of the sole muscles (10%-25%) to approximately 61% by using the elastic tendons at the ankle, mainly the achilles tendon.
During walking the achilles tendon slowly stores elastic energy in the tendons during the stance phase and quickly releases it at the push off phase similar to a catapult, this allows the ankle unit to be more efficient than the sole muscles. (“catapult mechanism”)
The ankle participates 35-45% of positive mechanical work of ankle, knee and hips during each stride while walking on ground level.
When the ankle cannot function to its full effectiveness, (injury, sickness, amputee) the work required for maintaining a normal gait is redistributed to hip and knee muscles resulting in a higher metabolic cost of walking.
Rundown
Introduction
Simple passive pendualr models can be used to predict the energetics of bipedal walking. Energy can be conserved by the elasticity of the leg during the stance phase.
“The major source of energy loss during walking is the foot-ground collision(12)”
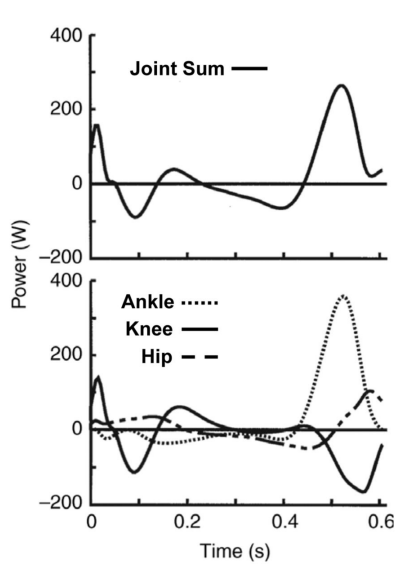
“When viewing the stance phase only, the ankle joint performs 60% (30 J out of 50 J) of the summed ankle, knee, and hip positive mechanical work (5) (Figure 1).”
Figure 1. Stance limb mechanical power during level walking at 1.52m/s for a single leg over the stance phase. Top panel shows the total power produced by ankle, knee and hip. The bottom panel shows the mechanical energy production for ankle, knee and hip. Figure is adapted from Devita et al. (5).
Spring inverted pendulum models appear to better represent real life walking than rigid ones, therfore it is possible that the muscles might not be the primary source of positive mechanical work at all the joints during walking.
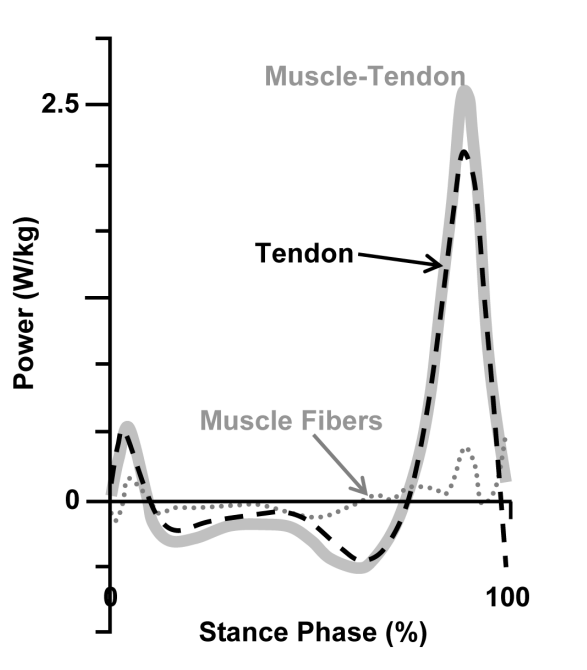
“Essentially, the plantar flexor muscles and their long compliant tendon act like a catapult. The Achilles tendon slowly stores elastic energy during the majority of stance, releasing it at just the right moment to produce a rapid recoil with very high pushoff peak power output (9,15).” See figure 2.
Joint mechanics during walking
During early stance, the knee joint functions as a shock absorber, doing negative work. The negative work outweighs the positive, see figure 1, bottom panel (The figure only shows the stance phase excluding the swing phase). Negative muscle work has approximately five times the efficiency of positive muscle work (16).
The hip joint both absorbs and produces power. It performs positive power when the leg gets extended or swung foreward and negative work after midstance when it moves the upper body over the leg.
The larger proximal muscles of the hips are more likely to be sources of high muscular work output than distal muscles at the ankle, which are generally better suited for storing and returning elastic energy during locomotion.
For level walking, we found that the ankle joint apparent efficiency was approximately 61% (23).
Figure 2. Ankle joint "catapult mechanism" during walking: The muscle fibers contribute very little to total muscle tendon mechanical power output but the Achilles tendon stretches and returns a significant amount of mechanical energy. Figure is adapted from Ishikawa et al. (9).
Implications of decreased ankle efficiency
The efficiency of the “catapult mechanism” can be decreased by wrong timing of muscle activation, plantar flexor weakness or the lack of the whole limb.
“In these cases, the individuals may redistribute the work load from the ankle to less efficient proximal joints (i.e. knee and/or hip). Increased reliance on hip and knee musculature, however, comes at a higher metabolic cost. “
Prostheses
There are transtibial prothetic limbs that store and return elastic energy. Yet, these protheses only recover only about 40%(19) of elastic energy, which is significantly less than which can recover up to 80-90% (2, 9). Furthermore, beacuse of the lack of a “catapult mechanism” only a small amount of the stored energy is returned at the appropriate time (13,19).
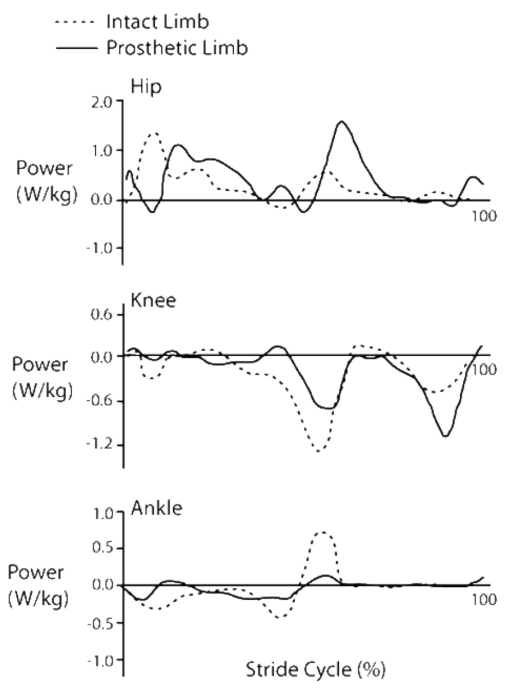
“Because of the decreased pushoff, transtibial amputees rely on the hip and knee joints to provide more mechanical power to their gait (21). ” See figure 7.
Figure 7. Joint mechanical powers at the hip, knee and ankle during gait in transtibial amputees at a walking speed of 1.27m/s. The dashed line indicates intact joint power and the solid line the prosthetic limbs power. The prothetic legs hips power is increased to compensate for the decreased prosthetic ankle power at pushoff. Figure was adapted from Sadeghi et al. (21).
The prosthetics “ankle” pushoff power is reduced but when compared to the power output of the intact ankle of the anmputee. Furthermore when comparing the pushoff power of the intact amputee leg to the ones of young healthy subjects walking at the same speed it is evident that the amputee has to adjust their gait to the lack of active plantar flexion even with the intact limb.
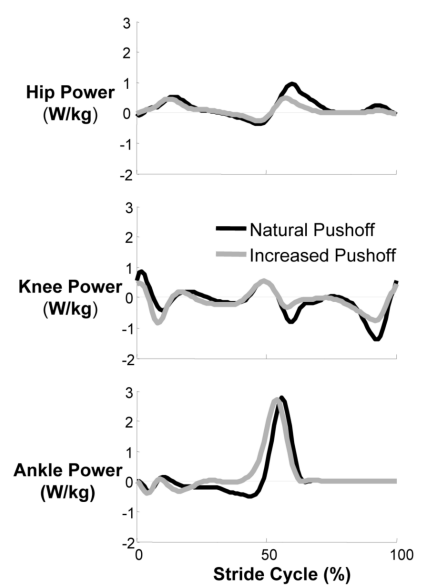
Comparing figure 8 to figure 7: The young healthy subjects have a peak ankle power of approximately 3W/kg, while the amputees had less than 1W/kg even with the intact limb(21) at the same speed.
“Conversely, the hip flexor power peak following prosthetic limb push-off was nearly 150% of young healthy subjects.”
This redistribution of mechanical power may help explain the increase of metabolc cost of walking even with an energy storing prosthetic foot.
Figure 8. Joint mechanical power at the hip, knee and ankle during gait with natural and increased pushoff. Healthy young subjects walked at 1.25m/s with natural gait (black line) and consciously increased plantar flexion pushoff (gray line).
Thoughts
Similar to a previous summary “Adjusting leg stiffness” it is interesting to see that even when the optimal function of the limbs is compromised (or the surface stiffness changes) the body tries to maintain a close-to-normal gait even when the metabolic cost of the movement increases.
It is noteworthy that a “simple” elastic transtibial prothetic ankle is not very efficient at supporting the amputee to maintain a normal gait. Ruther a mechanism is needed to mimic the “catapult mechanism” of the achilles tendon. There are ankle exoskeletons that take this into account.
However the “catapult mechanism” does not necessarly apply for running as discussed in the paper “The Biomechanics of the Achilles Tendon “