2024-03-09
This page tries to provide a simple to understand rundown of the study “Passive Knee Exoskeleton Increases Vertical Jump Height”.
Link
https://ieeexplore.ieee.org/document/9812737
License
CC BY 4.0
Credits
Authors: Coral Ben-David, Barak Ostraich, and Raziel Riemer
Figures, unless otherwise specified, have been taken from the study.
One sentence summary
The study shows that by using an exoskeleton with springs in parallel with the knee, vertical counter movement jump height can be increased by 6.4%.
Takeaway
- Springs allow for a transfer of energy from one phase of movement to the other, in this case: Knee flexors stretch the springs while lowering the center of mass, and then the energy gets released in the upward movement phase of the jump.
- To achieve a gain in jump height, the movement pattern of the user has to be adjusted by training for the exoskeleton to take any effect.
- The exoskeleton can be seen as a tool which only shows any effect when properly used.
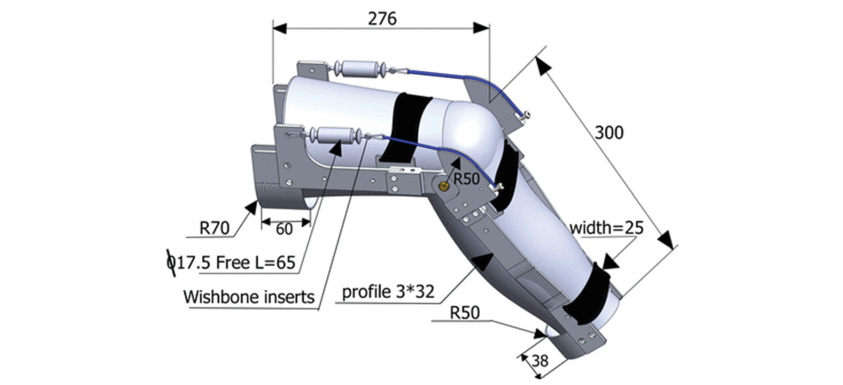
This study describes how a standing vertical jump with folded arms was increased with the use of two passive knee exoskeletons. The design can be seen in the figure below. The exoskeleton is comprised to a frame which attaches to the body around the knee with velcro straps. Two hinge joints allow for extension and flexion of the leg. Springs attached to ropes run over the hinge joints via round pulleys. One exoskeleton has a weight of 1.5 kg. Speargun rubber bands were used as springs.
Rundown
The exo was only tested with standing vertical jumps with folded arms. The exoskeleton enabled its users to jump 6.4% higher. One knee exoskeleton provided a joint stiffness of 28.5 Nm/rad or 52.5 Nm at 90 degree knee bend angle, for both exoskeletons the total stiffness was 57 Nm/rad or 105Nm at 90° knee bend angle. The spring provided approximately 50% of the biological knee peak moment.The jump height was only increased after participants got instructions on how to use the exoskeleton. The instructions involved getting into a lower sqaud position during the initial phase of the jump. The study suggests that this gain in jump height can further be increased by using different jumping techniques and a longer training period. The time of getting into the initial squat position incresed from 0.85 ±0.34 seconds without the exoskeleton to 2.65 ±1.85 seconds with the exoskeleton.
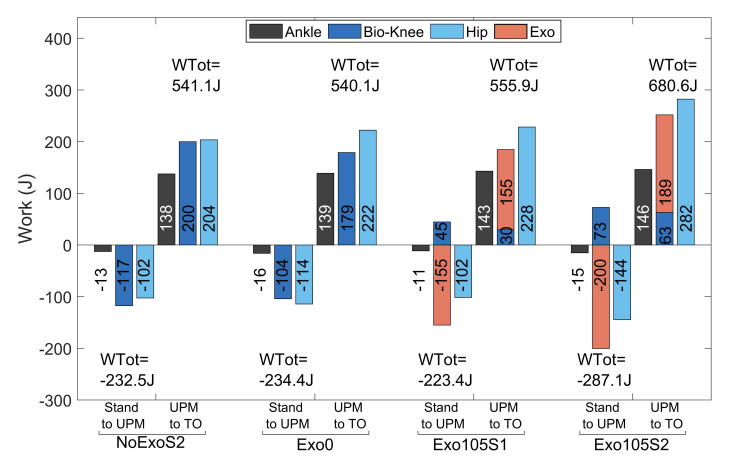
Figure 5 shows the work performed by the exoskeleton and human joints. Negative work was done by the joints when lowering the body to get into the squat position of jumping, descibed here as Stand to Upwards Movement (UPM). Positive work was done from the lowest position (UWM) up to the point where the toes leave the ground, named take-off (TO) in the paper. The sum of the negative and positive work is proportional to the jumping height. While performing a normal squat for example, the total work would be zero, because the center of mass ends up where it first was.
Four conditions are presented in figure 5:
- NoExoS2: Jumps without the exoskelton in session 2
- Exo0: Jumps with the exo but with no springs attached. The exoskeleton acting as a dead weight
- Exo105S1: Jumps with exoskeleton session 1
- Exo105S2: Jumps with exoskeleton session 2
When using the exo the following can be observed:
- Where previously only negative work was done, now positive work is done in the phase of getting into the upwards movement (UPM) position by the knee flexors to stretch the spring, as can be seen in the Exo105S1 and Exo105S2 conditions as red bars.
- Work done by the muscles around the knee decreases while total work around the knee increases
- The work done around the hips increased
- The work done around the ankle stays almost the same under any condition
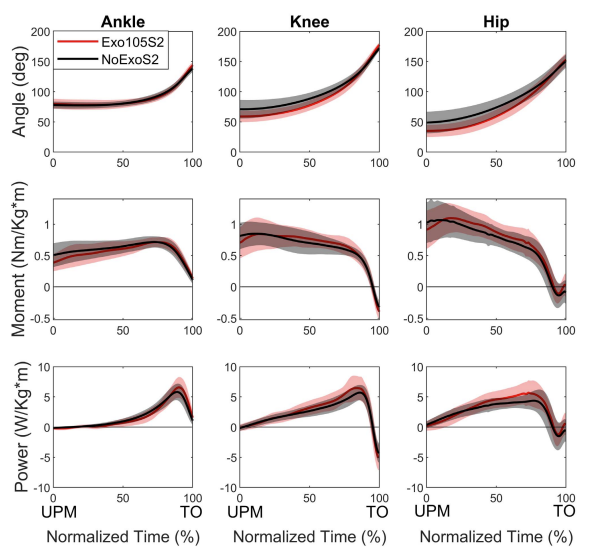
In Figure 6 in the angle row we can see that participants dropped lower with the exoskeleton (red line) than without it (black line). The moment peaks of the knee and hips increased with the exoskeleton as compared to without it. Even though the moment around the ankle decreased its peak power increased slightly in the later third of the jump. What the graph does not show is the difference in time spent between the beginning of the upwards movement (UWM) to take off (TO).
Room for improvement
- Fit
- For some it would squeeze at the leg, prohibiting optimal muscle function.
- Better fit could reduce localized pressure
- Training
- A longer training period could further increase jump height
- Jumping technique
- Different jumping techniques could further increase jump height
- Spring stiffness
- Two spring stiffnesses were tested, the results showed that the stiffer one resulted in a higher jumps. An optimal spring stiffness for maximum jump height has to be found. (Discussed by the some of the same authors in the study “Design of a Multi-Joint Passive Exoskeleton for Vertical Jumping Using Optimal Control “)
Hardware in depth
- The springs
- Speargun rubber was used.
- For each exoskeleton three springs were used.
- Each spring has a stiffness of 4456 N/m*
- One knee exoskeleton provided a joint stiffness of 28.5 Nm/rad or 52.5 Nm at 90 degree knee bend angle, for both exoskeletons the total stiffness was 57 Nm/rad or 105Nm at 90° knee bend angle.
- For both knee exoskeletons the springs provided a total force of 2.1 kN at 90° knee bend.*
- At a knee bend angle of 135° or 3/4 π the springs extended by 118mm.*
- At 135° knee bend angle the springs provided 39.375Nm per exoskeleton around the knee*
*These values are calculated from values presented in the study, but do not originally appear there.
- The frame
- The frame was made from 6061 aluminium alloy
- The total weight of both exoskeletons is 3kg
- A simple hinge joint was used to allow bending at the knee joint.