Authors: Daniel P. Ferris, Micky Louie, and Claire T. Farley
Figures, unless otherwise specified, have been taken from the study.
One sentence summary
This study shows that a runner automatically adjusts their leg stiffness to maintain a similar running pattern on different surface stiffnesses.
Take away
The ability to adjust leg stiffness allows humans to run similarly on different surfaces.
During running the vertical displacement of the center of mass (COM), vertical stiffness, stride frequency, and the peak ground reaction force stayed relatively the same regardless of surface stiffness, to achieve this leg stiffness was adjusted.
Rundown
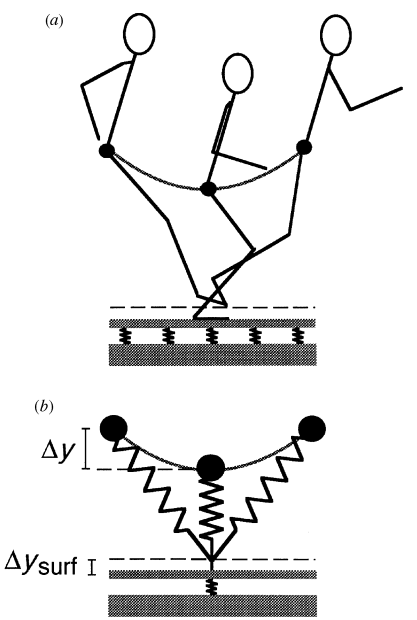
The study is based on the spring-mass model of running as can be seen in figure 1.
Figure 1: The spring-mass model. (a) Stick figure of a human runner and (b) the spring-mass model, both on a compliant surface. The spring corrosponds to the leg and the point mass to the body mass of the runner. The surface essentially adds a spring in series with the spring-mass system. The compression of the surface (Δysurface) adds to the displacement of the center of mass during ground contact(Δy). Introduced by (Blickhan 1989; McMahon & Cheng 1990)
The vertical stiffness is a key characteristic in running dynamics however, it does not correspond to any physical spring in the runner or the model. It is calculated from the peak ground reaction force and the vertical displacement of the center of mass (COM) on its lowest point. The peak ground reaction force and the lowest point of vertical displacement occur at the same moment.
The leg stiffness is calculated from the change in length of the leg divided by peak ground reaction forces.
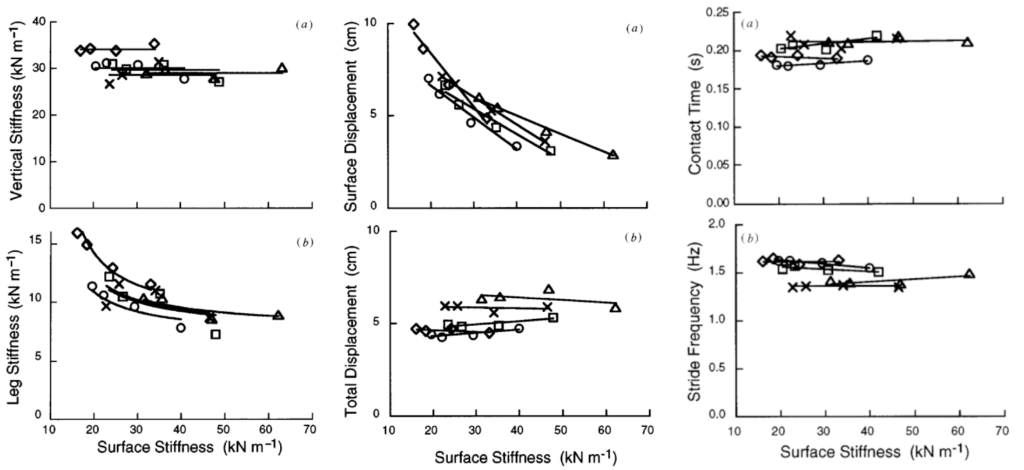
Figure 2 to the left, Figure 3 in the middle and figure 4 to the right. Each symbol represents data of a single runner. Vertical stiffness, total vertical displacement, contact time and stride frequency stayed relatively constant even with varying surface stiffness.
Discussion
This study showed that vertical stiffness stayed the same on surfaces with varying elasticity, this most likely is also true for surfaces that dissipate energy like sandy surfaces (Zamparo et al. 1992).
When the running surface is more compliant the leg stiffness increases, resulting in a straighter position and lower joint moments and muscle forces this may explain why running performance is enhanced on compliant running tracks for middle- and long-distance running events (McMahon & Greene 1978).
For calculating the total vertical stiffness when running with shoes the stiffness of the shoes has to be taken into account.
Numbers
The leg stiffness increased up to 68% between the most stiff and most compliant surfaces.
Leg stiffness of the five participants ranged from 16 to 7kN/m
The peak vertical ground reaction force for the participants was 2.92 ± 0.04 times body weight.
For a runner with a leg stiffness of 18 kN/m, a track stiffness of 195kN/m (McMahon & Greene 1979), and a shoe stiffness of 200 kN/m (Alexander & Bennett 1989), leg stiffness would be increased by 22% to maintain a constant vertical stiffness.
Thoughts
The first thing that comes to mind here is that the bodys effort to maintain a constant vertical stiffness might be an answer to a question in the previous study summary: The study showed that vertical jumping height could be increased if springs were put in parallel with the knee joint. While jumping with the exoskeleton the total work around the knee increased by 28% but the work produced by muscles around the knee decreased by 68% when compared to a jump without an exoskeleton. This might be due to the fact that the body tries to maintain a constant vertical stiffness. Of course, this study does not discuss the vertical stiffness of a jumper but a runner. This concept of the body’s effort to maintain a constant vertical stiffness might prove very useful in designing exoskeletons.
If there is a link that for example a higher leg stiffness corresponds to higher running performance we could artificially increase the leg stiffness by adding springs in parallel.
It would be interesting to see how the total vertical stiffness influences other running parameters like striding frequency or peak ground reaction forces.
Furthermore, this study raises the following questions:
Is there a vertical stiffness in jumping/landing?
Are there similar mass-spring models for different jumping techniques?
How do we have to change the body’s vertical stiffness to boost performance?